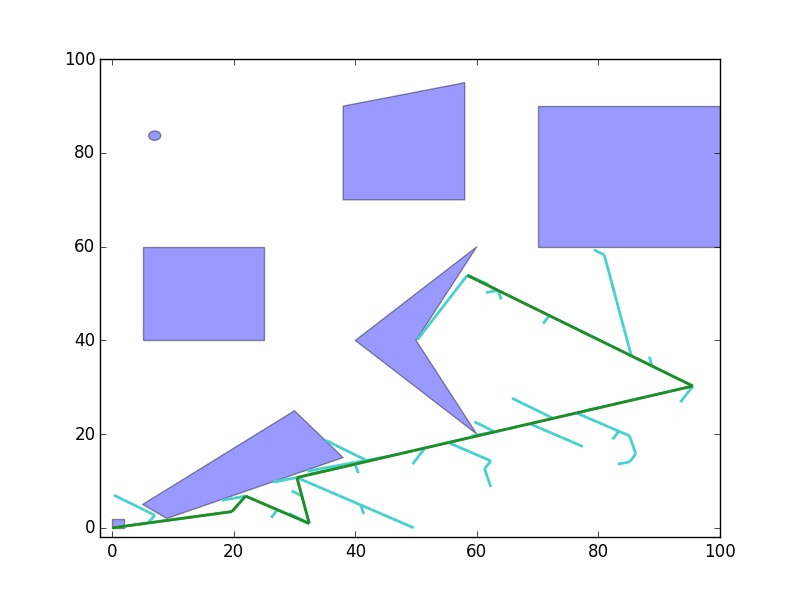
Robot with initial orientation as 10 degrees.
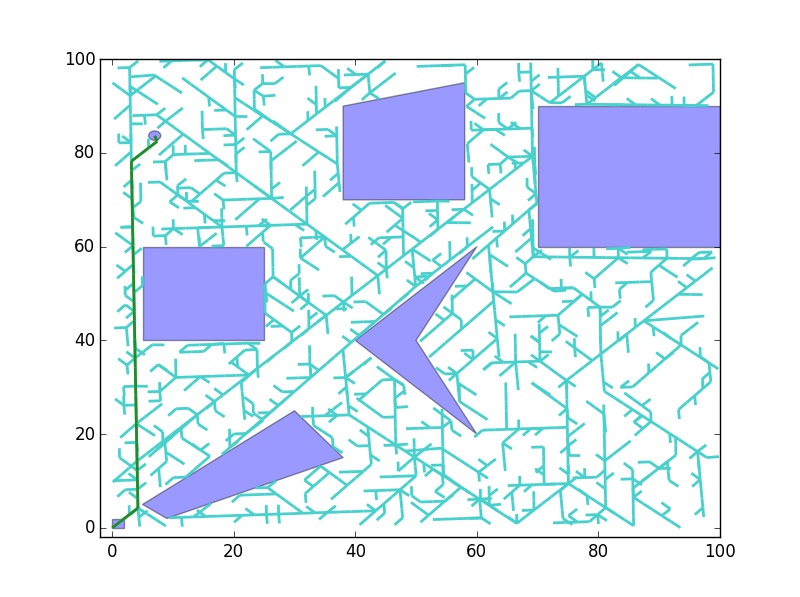
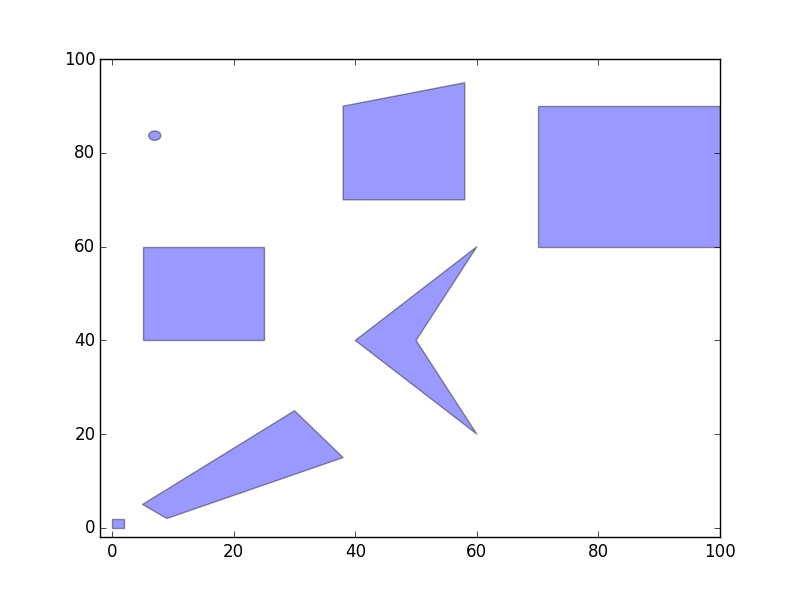
Problem to be addressed here is to find a continuous, collision free path to bring a robot from an initial configuration to a goal configuration by implementing a path planning system.
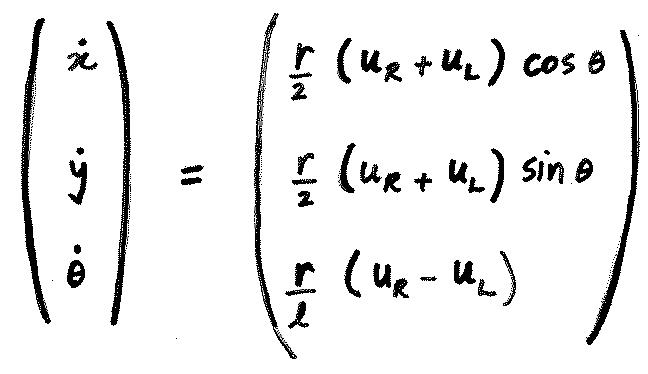
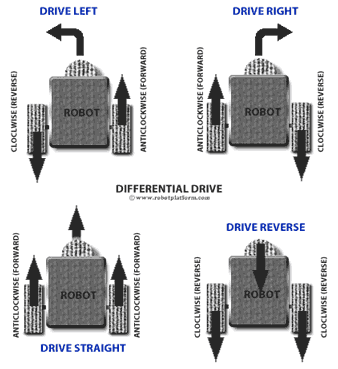
With radius of wheels as 'r' and distance between wheels is 'L'.
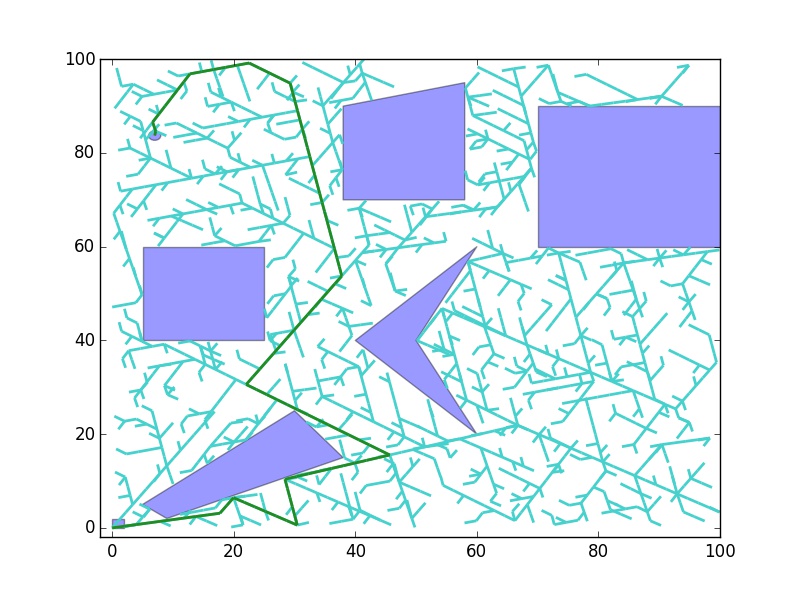
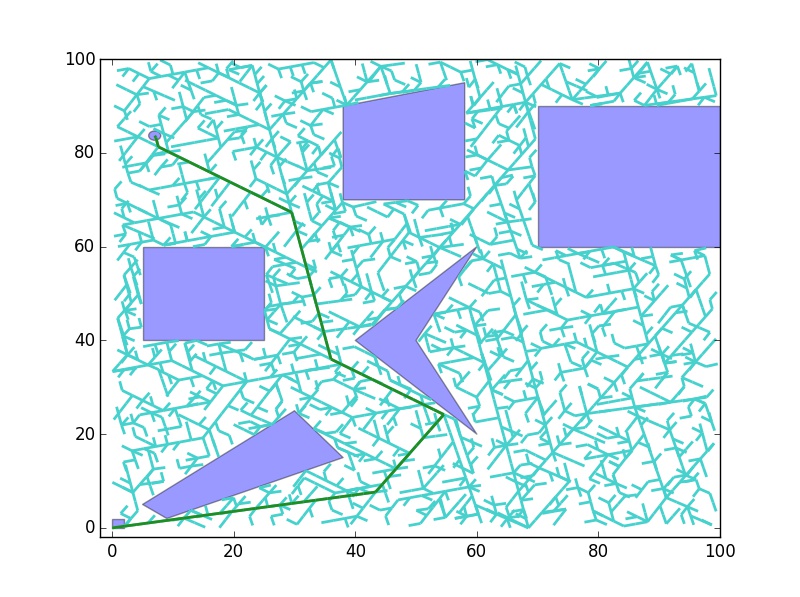
This part of the code does the Main part of the algorithm of Building RRT, finding shortest path from intial to goal configuration. Also plotting the environment with the shortest part found.
Robot with initial orientation as 10 degrees.
Robot with initial orientation as 90 degrees.